 Bot Bench I'd Rather Be Building Robots
Bot Bench I'd Rather Be Building Robots
My current project, well, the one I seem to be spending the most time on is a robot called A-Maze-Ing. It is based on a Lego Mindstorms NXT brick. This robot is, or rather, will be, a line-maze solving robot.
The first challenge in building this robot was its size. Rules dictate the robot should not exceed 15x15x15 cm at any time during the run. That might seem like a lot, but the brick’s size and the motors’ lengths make this quite a daunting task. It took quite a few iterations.


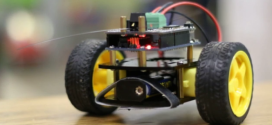
 The robot on the left (above) is one of the first models. It was badly designed as it turned out because the light sensors were packed too closely together. I would get false positive readings on the side sensors even when no crossing or T-junction was present. The second model on the right (above) is the current model. The sensors are placed as far apart as possible and the swivel wheel on the back of the early model has been removed completely. The robot now makes use of two round bricks that it slides on as shown in the picture on the right. As of this moment he robot can’t do much yet. So far I have programmed the state engine frame work and the ability for it to turn right when it detects a… right turn. The other parts of the state engine do nothing.
The robot on the left (above) is one of the first models. It was badly designed as it turned out because the light sensors were packed too closely together. I would get false positive readings on the side sensors even when no crossing or T-junction was present. The second model on the right (above) is the current model. The sensors are placed as far apart as possible and the swivel wheel on the back of the early model has been removed completely. The robot now makes use of two round bricks that it slides on as shown in the picture on the right. As of this moment he robot can’t do much yet. So far I have programmed the state engine frame work and the ability for it to turn right when it detects a… right turn. The other parts of the state engine do nothing.
Here is a quick, very short video I made of A-Maze-Ing’s ability to detect a right turn and turn. It will try to place itself correctly on the line once the turning is done.
More videos will follow as I progress. The first goal is to make a robot that can solve a maze without loops using the simple follow-the-right-wall method. Next generations will be able to solve mazes with loops and ultimately calculate both the shortest AND quickest paths.


It seems nice. 🙂
I hope that you show it me on the next meeting.
Jildert
[…] is Apollo, the smallest NXT based line follower I’ve ever made. It’s loosely based on A-Maze-Ing, which I designed and built quite a while […]
[…] is Apollo, the smallest NXT based line follower I’ve ever made. It’s loosely based on A-Maze-Ing, which I designed and built quite a while […]