 Bot Bench I'd Rather Be Building Robots
Bot Bench I'd Rather Be Building Robots
 Earlier this week I received another package from Rotacaster with some more wheels for me to test and play with. These ones had new molded hubs, instead of the white 3D printed ones. The grip on the axles is much better now and they’re still working on making them even better. The wheels have three different durometers (hardness) and I’m going to see which one performs best under which conditions. To do this I needed a good testing platform.
Earlier this week I received another package from Rotacaster with some more wheels for me to test and play with. These ones had new molded hubs, instead of the white 3D printed ones. The grip on the axles is much better now and they’re still working on making them even better. The wheels have three different durometers (hardness) and I’m going to see which one performs best under which conditions. To do this I needed a good testing platform.
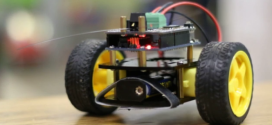
I made a new omniwheeled robot, this time it’s much, much smaller. It’s a cross between Laurens Valk’s 6 legged robot from the Discovery Book, Aswin’s rotacaster platform and something I created last year. I intend to make 3 of them (I have two already), one for each set of different wheels I was given. I want to do tests with an accelerometer to see which one has the fewest vibrations on different surfaces. I will post the results on my blog when I have them.
For now here are some pictures of the new robot. Enjoy!




There should be enough information there to copy this design, I think. Below is a picture that will give you a good comparison to the previous platform.

The new frame also weighs about half. The big one comes in at a hefty 928 grams and the small one is a mere 513 grams. Mind you this is without the NXT or a battery pack.
I will post the results of my tests when I’m done with them, so be sure to check back!


{kind=link}
Cool pictures! So when the three wheels have different hardness, does that also mean they have different grip on the surface below?
DiMastero,
Yeah, the black ones are really grippy, bit like the NXT 2.0 wheels.
[…] I was building one of my previous omniwheel frames, I wondered if I could rebuild it using nothing more than the parts that came with an NXT 2.0 […]
Can the accelerometer readings be converted into velocity (like mm/sec or something) ?
Probably 🙂 The noise is pretty bad, though.