Bot Bench I'd Rather Be Building Robots
Bot Bench I'd Rather Be Building Robots
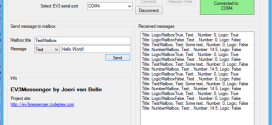
I was contacted Joeri van Belle last week about a new project that he is working on, a C# project that allows you to send messages to your EV3. Using it, you can send and receive messages between your EV3 brick and PC. On the brick you can use the standard BT communication blocks, so you can do this without ...
Read More »Talking to your EV3: EV3Messenger