Bot Bench I'd Rather Be Building Robots
Bot Bench I'd Rather Be Building Robots
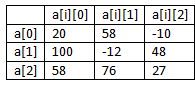
(Almost) everything you wanted to know about arrays in ROBOTC but were afraid to ask. RoboDesigners have written up a quick explanation of how arrays work and help you visualise them. It has some ROBOTC specific code in it, but would probably work fine for most programming languages. Thanks for taking the time to write it up!
Read More »ROBOTC Arrays Tutorial