Bot Bench I'd Rather Be Building Robots
Bot Bench I'd Rather Be Building Robots
A  very cool Kickstarter project was brought to my attention this morning, the Edison. It’s a very small and light robot that has a surprisingly high number of features up its sleeve. A few of them should be immediately obvious to most: the LEGO compatible pin holes and knobs. The bottom of the robot has a few strips of LEGO plate-like receptacles, so you connect bricks to that side, too (or stack multiple Edisons). However, that’s not all this little robot has, check it out:
very cool Kickstarter project was brought to my attention this morning, the Edison. It’s a very small and light robot that has a surprisingly high number of features up its sleeve. A few of them should be immediately obvious to most: the LEGO compatible pin holes and knobs. The bottom of the robot has a few strips of LEGO plate-like receptacles, so you connect bricks to that side, too (or stack multiple Edisons). However, that’s not all this little robot has, check it out:
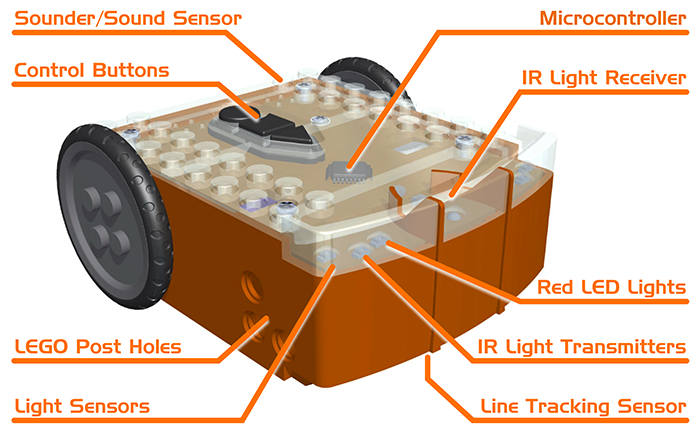
To begin with, it has the following sensors:
- Infrared obstacle detectors (left and right)
- Line tracking sensor
- Light sensors (left and right)
- Infrared receiver
- Infrared transmitter
- Piezo sounder
- Sound sensor
Other than that, it also has:
- Two motors with variable speeds
- Left and right red LED lights
- Three control buttons
It comes with, what seems to be, a very easy to use graphical programming language. It reminds me a bit of the WeDo software by LEGO, but a heck of a lot more powerful.
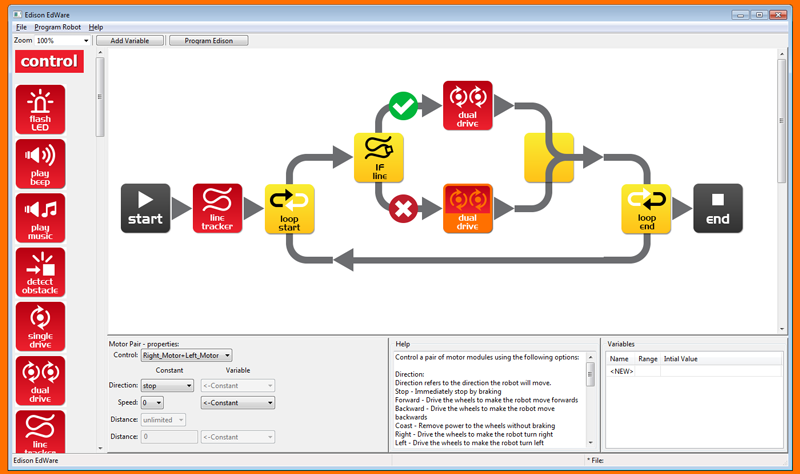
It has support for 8 and 16 bit variables, this is fine for most applications. I had a play with the software, which you can download here: [LINK]. Even without a robot, you can still play with the blocks. The configuration of the blocks is very reminiscent of the NXT-G programming environment. I like that it is super easy to add new variables and to keep a view of all of them (bottom right on the above screenshot). The help is integrated into the UI. The IDE allows up to 1000 blocks per program. That is quite a huge number, it seems. The program flow blocks look nice and are visually appealing. It is quite easy to find the blocks you need in the panel on the left of the screen. I couldn’t figure out how to do the event based programming, which this also supports, but that may be because it is not finished yet or I am simply too thick. Once thing I thought was pretty awesome, was the fact that the robot can detect when a motor is under strain, so no need to worry about burning up your motors! The UI also allows you to zoom in and out. That’s a great feature if you have a small screen or a very large program, or both! The individual panel sizes are easily resized.
The hardware programming mechanism is pretty nifty. The environment emits a modulated sound, which is translated into IR with a cable/adapter and picked up by the robot’s IR receiver. It’s a wonderfully simple mechanism and would make it possible to program the robot with a mobile device, like a tablet, in the future. I noticed that the programming environment seems to have been made with Python and a windowing toolkit, which is a great way to ensure that it works on multiple Operating Systems, like Windows, OSX and Linux. Currently, there is only a Windows version available. I tested it on a Windows 8.1 VM. I was surprised at the size of the download, which was less than 8MB. Installation was a matter of a few seconds.
Anyway, take a look at the Kickstarter page, perhaps this is the Droid you’ve been looking for.