 Bot Bench I'd Rather Be Building Robots
Bot Bench I'd Rather Be Building Robots
Some of you may remember I posted about my VEX IQ Quadruped a while back. I now have building instructions for it!
They were made by Christopher Richard Smith, who is quite the CAD ninja. This is what the Quadruped looks like when it is walking:
- You can download the software here: [LINK].
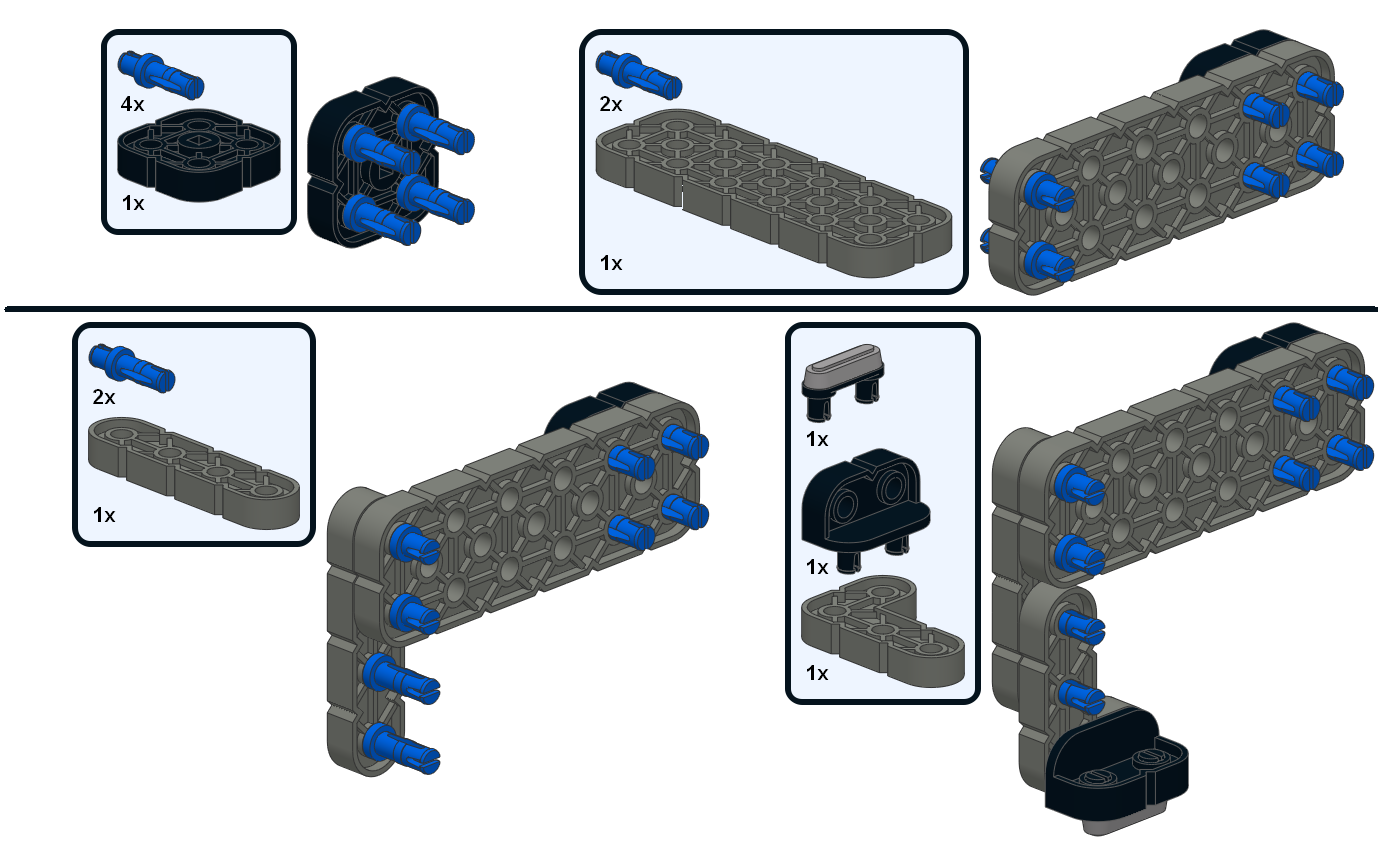
- You can download the building instructions for it here: [IQuadruped]




Hi, I have a little question for you I hope you can help me, thank you very much.
What software you use to make the instructions to build robots?
I believe LDraw/MLCad/LPub was used. I did not make these, I created the robot and my friend Christopher Richard Smith made the instructions.
You really only need the VEXIQ library of parts..not everything at LDraw. You can find links and other info my blog..or in VEX’s IQ Forum.
Okay ive got the robot working but only two of the legs actually move. During the calibrations, all legs moved. How can I fix this problem? Thanks
Chances are that the battery is too low. That’s fine for when it’s calibrating, but not when it’s walking. That requires an enormous amount of power to do. They often don’t last very long either.