 Bot Bench I'd Rather Be Building Robots
Bot Bench I'd Rather Be Building Robots
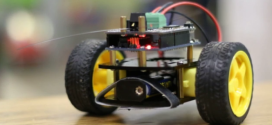
This is my current project and the robot I’ll be taking to Lego World. Tammy took these pictures for me. Click on them to see a much bigger version.
 |
 |
 |
 |
 |
 |
It has 2 Zamor canons, 4 Rotacaster wheels, HiTechnic Gyro and Acceleration Sensors and a Lego Sonar sensor. It’s programmed in ROBOTC. It’s a holonomic robot, meaning it can move in any direction it wants to.
More pictures and videos will appear after Lego World, so you’ll just have to go there to see it in action!


I’m looking forward to see the terminator on LEGOWORLD!
These Rotacaster wheels definitely look interesting. Where are they available? The site you linked to allows for preordering only.
I am not sure when they’ll be available hut as soon as I know more, I’ll let people know 🙂
Looks awesome (and mighty fierce). Any hints about how you’re using the gyro and accel sensors? Also, it looks like the Sonar is mounted on a swivel. Is it used for targeting? …navigation? …both?
I can imagine some good zamor strafing abilities with rotacasters!
-Loopy
The gyro is used for calculating the heading. The accelerometer is used for collision detection. Aswin gave me an Excel sheet with the formulae to better distinguish between noise and actual collisions, so I’ll have to translate that to ROBOTC code. Still quite a bit of work to do.
Using an accelerometer for collision detection? That’s … creative.
It’s better looking than bumpers all over it 🙂
Pretty good idea indeed.
I would be interested in seeing a video of what it does. I should be interesting.
I’m also surious if you will post the code. If I built a duplicate of the base, put a tripod on it, and mounted a camera, the physical structure would let me move and rotate the camera, but my programming skills might not.