 Bot Bench I'd Rather Be Building Robots
Bot Bench I'd Rather Be Building Robots
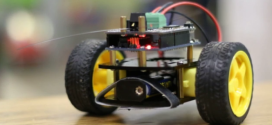
 I made some updates to the line following program for the Rotacaster One-Kit Omniwheel robot. This version 2.0 allows you to adjust the Gain and Power variables by turning the back wheels back and forth. When you’re happy with the values, you can hit one of the bumpers and it’ll start the auto-calibration routine and attempt to follow the course you made. This should make it much more fun to play with this robot as you won’t need to constantly reprogram it through the NXT-G interface.
I made some updates to the line following program for the Rotacaster One-Kit Omniwheel robot. This version 2.0 allows you to adjust the Gain and Power variables by turning the back wheels back and forth. When you’re happy with the values, you can hit one of the bumpers and it’ll start the auto-calibration routine and attempt to follow the course you made. This should make it much more fun to play with this robot as you won’t need to constantly reprogram it through the NXT-G interface.
The Gain variable can be anything above 0 and the Power variable can have any value between 20 and 90. The motors will give you feedback when you attempt to go beyond these values. This little trick was honestly stolen from Gus’ BT Remote for the HT Way. As they say in The Netherlands: “Beter goed gejat dan slecht bedacht.”, or in English, “It is better to steal something good then to invent something bad.” Thanks, Gus!
You can download the new RBTX file right here: [LINK].


If you were to draw a circle connecting each point of the wheel, what would be the diameter?
Maybe about 25 cms or so? Perhaps a little less.