 Bot Bench I'd Rather Be Building Robots
Bot Bench I'd Rather Be Building Robots
ROBOTC 4.32 is here and it includes a few new features and plenty of bug fixes and enhancements.
Please note that if you use LEGO MINDSTORMS EV3, you must update the Linux Kernel to 1.07X, after which you must update the ROBOTC VM as well, of course.
Links for downloading files:
- ROBOTC 4.32 for MINDSTORMS EV3 and NXT: [LINK]
- ROBOTC 4.32 for VEX Cortex and IQ: [LINK]
- ROBOTC 4.32 for Robot Virtual Worlds (MINDSTORMS): [LINK]
- ROBOTC 4.32 for Robot Virtual Worlds (VEX): [LINK]
Robot Virtual Worlds Package Manager
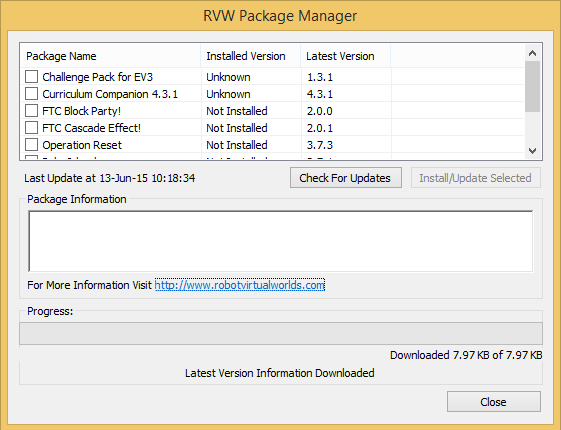
Robot Virtual Worlds Package Manager simplifies keeping your RVW worlds up-to-date and allows you to easily download new ones. After the packages have been downloaded and installed, they will appear in the virtual world selection menu.
ROBOTC Macro Editor
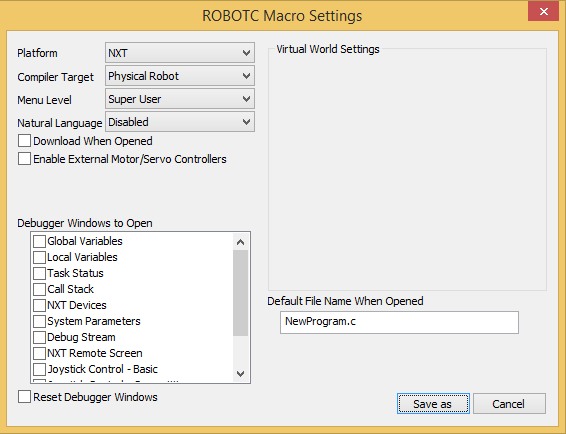
The RBC Macro Editor allows you to quickly create a ROBOTC Text-Based or Graphical macro file that will pre-configure many aspects of the UI, such as platform, the debugger windows that are to be opened, the default save-as file name and many others. If you are targeting Virtual Worlds, you can also select which world should be used. This is super useful in class room environments, or in my case, a Coderdojo! The kids simply need to click the macro file, which will open ROBOTC with all the settings you’ve setup.
General Changes
- Debug Stream has been made more robust to prevent buffer overflows and corrupted data.
- Added quick access, “Add License” menu item.
- Added command line option to deactivate all active, non-building licenses (-DEACTIVATE).
- “SensorValue” intrinsic definition changed from ‘word’ to ‘int’. This will allow it be be either ‘short’ or ‘long’ depending on the native “int” format of specific platform.
- CTRL+ALT+SHIFT+D” is new keyboard accelerator to open preferences.
- All libraries (DLLs) and executables are now signed.
General Bug Fixes
- Fix issue where a “save as” with a new document -> then a subsequent “save” would cause a “save as” prompt in the wrong location.
- Fix enumeration bug in Joystick Driver
- Context menu for large ICON toolbar changes now take immediate effect.
- Fix the repeatUntil(0) warning message to say “‘repeat until’ expression is constant ‘0’. Loop will never exit.”
- Fix issue with command line deactivation with building licenses
- IDE was not removing error flags from graphical blocks.
- Long operands on opcodes “&” “|”, “^” and “~” were incorrectly handling negative 16-bit constants.
- Fix bug in addTo/MinusTo/DivideTo/TimesTo opcode when variable is a global short variable and the operand is a 16-bit or less compile time constant.
- Fix issue that prevented functions that return pointers to be dereferenced in an expression.
- Fixed a bug where the missing “Name” field would cause a crash for the command line activation.
Graphical
- Hitting the Control key no longer deselects all the things.
- Bug causing Graphical Block artefacts on the screen has been fixed.
MINDSTORMS
- New Linux image, updated to 1.07X to ensure compatibility with LEGO EV3 Programming Software. Please be sure to update your brick to the latest Linux firmware.
- EV3 brick can now be renamed from both the file and the communication utilities in the Robot menu.
- Refreshed the Driver Suite files for both NXT and EV3
- getColorRGB() will now also work with a standard LEGO NXT Color sensor.
- Added intrinsic getSensorConnType() to retrieve sensor connection type.
- Fixed multi-tasking issue in EV3 VM where multi-tasking was not possible with programs started directly from the EV3 Brick.
- Fixed a division by zero error in DatalogTest.c sample program
- Fixed an issue where uploading a file from your EV3 to your PC removed the file extension from the uploaded file.
- LEGO NXT Sensors that are normally auto-ID’d no longer have their auto-ID flag disabled for that port.
- LEGO Energy Meter was improperly configured.
- Fix Standard Model issue for EV3 (Gyro was improperly configured)
Vex
- Add 2 more RVW Cortex Standard Models.
- Enhancements to improve the VEX Cortex IME functionality in Virtual Worlds
- Fixed download firmware button not allowing you to cancel the procedure
- Small fix for VEX Cortex to disable sensor ports during initialization to prevent solenoid jitter.
- Fixed issue of “SQUAREBOT” standard model having PID control enabled with quadrature encoders.
- Fixed issue of “SQUAREBOT” standard model not having the VEX LCD configured.
- Removed the quadrature encoders from the “SQUAREBOT – IME” standard model.



