 Bot Bench I'd Rather Be Building Robots
Bot Bench I'd Rather Be Building Robots
I’ve played around with various vision systems on the MINDSTORMS, even the Pixy Cam, using an adapter. However, now Charmed Labs have created a version of the super popular Pixy Cam that will work pretty much out of the box with MINDSTORMS.
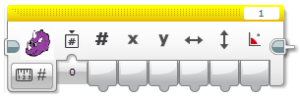 So, what’s different about this version and the standard one? Well, for one it comes with an adapter cable that plugs into the Pixy Cam and has a standard NXT/EV3 cable end on it. The other difference is the firmware. It’s been tweaked to work better with the eccentricities of the NXT and EV3 (and trust me, they’re very eccentric). You can program this Pixy Cam very easily in the EV3 software with their block.
So, what’s different about this version and the standard one? Well, for one it comes with an adapter cable that plugs into the Pixy Cam and has a standard NXT/EV3 cable end on it. The other difference is the firmware. It’s been tweaked to work better with the eccentricities of the NXT and EV3 (and trust me, they’re very eccentric). You can program this Pixy Cam very easily in the EV3 software with their block.
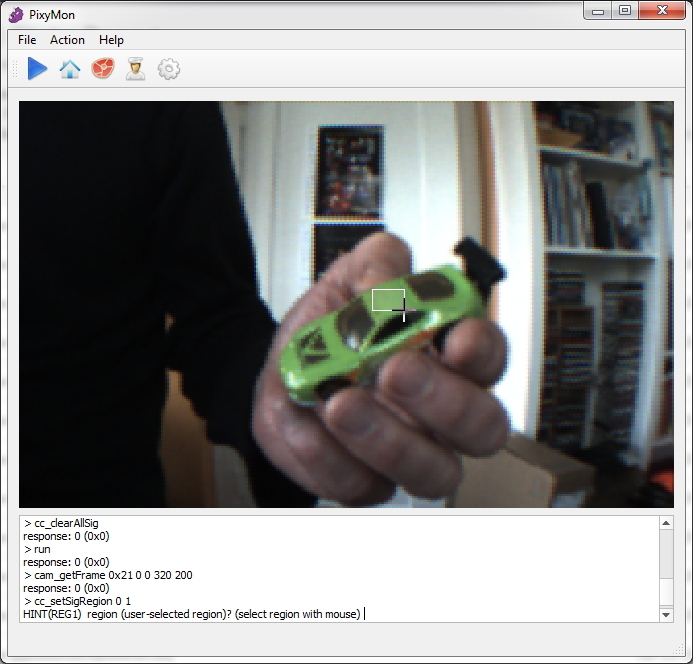 Training the Pixy Cam to “see” new coloured objects is so freaking easy. You can either point the camera at the coloured object you’re holding and press the “learn” button, or, if you want more control, you can use their utility. One of the coolest things is that you can also teach it a combination of two colours (a CC signature), like a coloured beacon, for example. The camera will detect it and give you information on the angle of the signature object and the size, which will make it easier to estimate the distance to it, if you’re good at maths!
Training the Pixy Cam to “see” new coloured objects is so freaking easy. You can either point the camera at the coloured object you’re holding and press the “learn” button, or, if you want more control, you can use their utility. One of the coolest things is that you can also teach it a combination of two colours (a CC signature), like a coloured beacon, for example. The camera will detect it and give you information on the angle of the signature object and the size, which will make it easier to estimate the distance to it, if you’re good at maths!
You can read more about the utility and the technical specs of the camera here: [LINK]
I am going to see if I can make one of those cables myself and see how well it works with the other firmware, I will keep you posted!



Will it be possible via RobotC to read all objects of a certain color signature?
Via LabView and the standard driver it is possible to get the largest signature object.
For example in 4-on-a-row I like to find all the red and yellow object and their center, so that I don’t have to move the camera and can scan all objects in one go.
I will be exposing all of the functionality that the PixyCam offers.
Hi Xander,
Did you have works on a driver for robotc ? do you know if we could access to all functionnality of the pixy with robotC?
Regards,
Thibaud
It would be GREAT if Pixy cam would make a camera and adapter that would allow the camera to be mounted in front of the EV3 screen to make the EEV# screen avaiable to visually disadvantaged and from locations where it is hard to see the EV3 Screen. I actually have to have a magnifier taped above mine.
I use the remote screen feature in ROBOTC. It basically creates a small window on your screen that has an exact copy of what’s being shown on your EV3.
Thank you, I’m just getting started with Robot C and didn’t know about that.
Thanks, there is very little information about Pixy Cam.
Do you have an hello world test of RobotC + Pixy Cam + lego EV3?
I don’t have any drivers for it right now. I did start with one, but I never finished it. Perhaps I’ll finish it up some day soon 🙂