 Bot Bench I'd Rather Be Building Robots
Bot Bench I'd Rather Be Building Robots
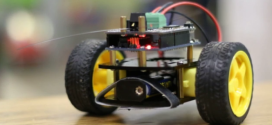
 My robot Skittles is a big robot; he’s probably one of the biggest wheeled robots I’ve made so far. When the Mindsensors PSP-Nx-V4 came in last week, I knew I had to make it remote controllable.
My robot Skittles is a big robot; he’s probably one of the biggest wheeled robots I’ve made so far. When the Mindsensors PSP-Nx-V4 came in last week, I knew I had to make it remote controllable.
I finished up the last bits of the driver for the new sensor yesterday and so this evening I cobbled together some code to make it work with the Mindsensors Motor MUXes that were already on there. It was quite a challenge to somehow figure out a way to hold the camera while I controlled the robot, so I made a clever rig with a belt and gorilla pod. You’ll have to watch until the end of the video if you want to see how awesome I looked.
As you can see in the video, Skittles can’t get over the threshold of about 1cm when he goes for it at a straight angle. However, when he’s turned to face it diagonally, he has no problems at all! The only trouble is that right now I am using cheap AA batteries and they don’t last very long at all with these motors working as hard as they do. It wasn’t long after the video was done that they gave up. Oh well, at least I managed to get a decent-ish video out of it.
Skittles uses:
- 1 x Mindensors PSP-Nx-V4 Sony PS2 Controller Interface for NXT with Referee Signal Receiver
- 2 x Mindsensors Motor MUX
- 4 x Rotacaster 125mm Omniwheels
Big thanks to both Mindsensors and Rotacasters for the cool toys they sent to me to play with!


I use a similar trick when moving heavy loads on a 4 whel cart, it seems that the same force applied to a single wheel instead of 2 wheels is enough to get over the bump. because of the angle you end up with 4 single wheels going over the bump instead of multiple wheels.
Oh yeah, Hi from Canada!!
Hey there Stacey,
I noticed a distinct lack of photos of robots on your site. That’s definitely something that needs to be fixed ASAP 🙂 Hrmm, on second though, maybe not, your photos are bound to look much better than mine!
Hi Xander,
I’m more of a computer/general technology guy. I should have a look at what’s going on at the robotics camp here this summer.
We met in Maarssen at the C64 meet in 2011.
Regards,
Stacey
Ah yes, I remember you now 🙂
I love those wheels and I have thought about getting a set more than once, then price shock sets in. They are just too expensive. A set costs almost as much as the NXT brick.
I’m curious why skittles ended up being large? was it just because of the wheels, motors and mux, or does he do (or intend to do) more?
Also, they have these new fangled things called tri-pods. It similar to what you have strapped under your belt, only larger so they can stand by themselves on a floor. eBay has them for less than the cost of a good set of batteries 🙂
Thanks for sharing, I look forward to hearing more of the story, mike
Xander,
Now that is a chunk of battery chomping LEGO Mindstorms!
I have the Rotocaster wheels and wondered about the difficulties of getting past small obstacles in its path when put into a platform like yours. I had not used them in that configuration because of it.
Enjoyed the “filming” aspect of the project as well.
When is the driver coming out mate?
Pretty soon 🙂